

QF-Arol
De QF-Arol is een magnetische robot waarmee u makkelijk metalen structuren verticaal reinigt. Zo is laserreiniging voortaan een optie voor nog meer toepassingen (patent aangevraagd).

Laser klasse 1
In sommige gevallen mag er tijdens het reinigen geen laserlicht zichtbaar zijn. Onze R&D-afdeling ontwikkelde daarom een lens die veilig kan worden gebruikt zonder laserbril. Patent aangevraagd.

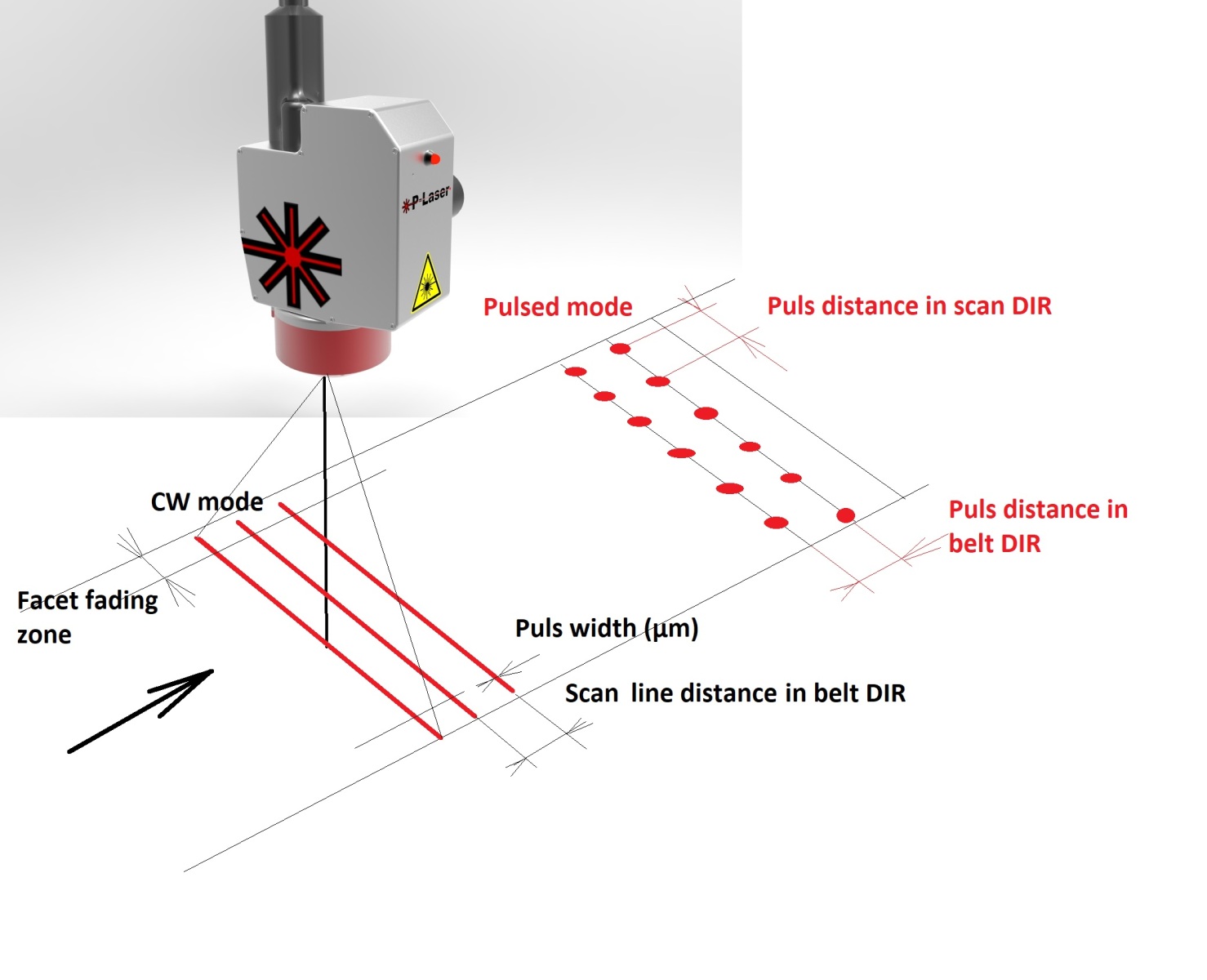
Ultrasnelle polygone scanner
P-Laser heeft een ultrasnelle scanner voor "continues wave" en gepulseerde laserbronnen ontwikkeld. Als u plaatmetaal met hoge snelheid moet reinigen, kan een normale optische scanner niet genoeg oppervlaktesnelheid genereren om het oppervlak volledig te dekken. Een polygone scanner bevat een snel roterende spiegel met meerdere facetten. Zo kunnen we oppervlaktesnelheden tot 600 m/s halen, waar dat bij een conventionele spiegelscanner maximaal 30 m/s is. Links ziet u een testopstelling met twee polygone scanners van 1500 W voor het reinigen van een transportband met een snelheid van 60 m/min.
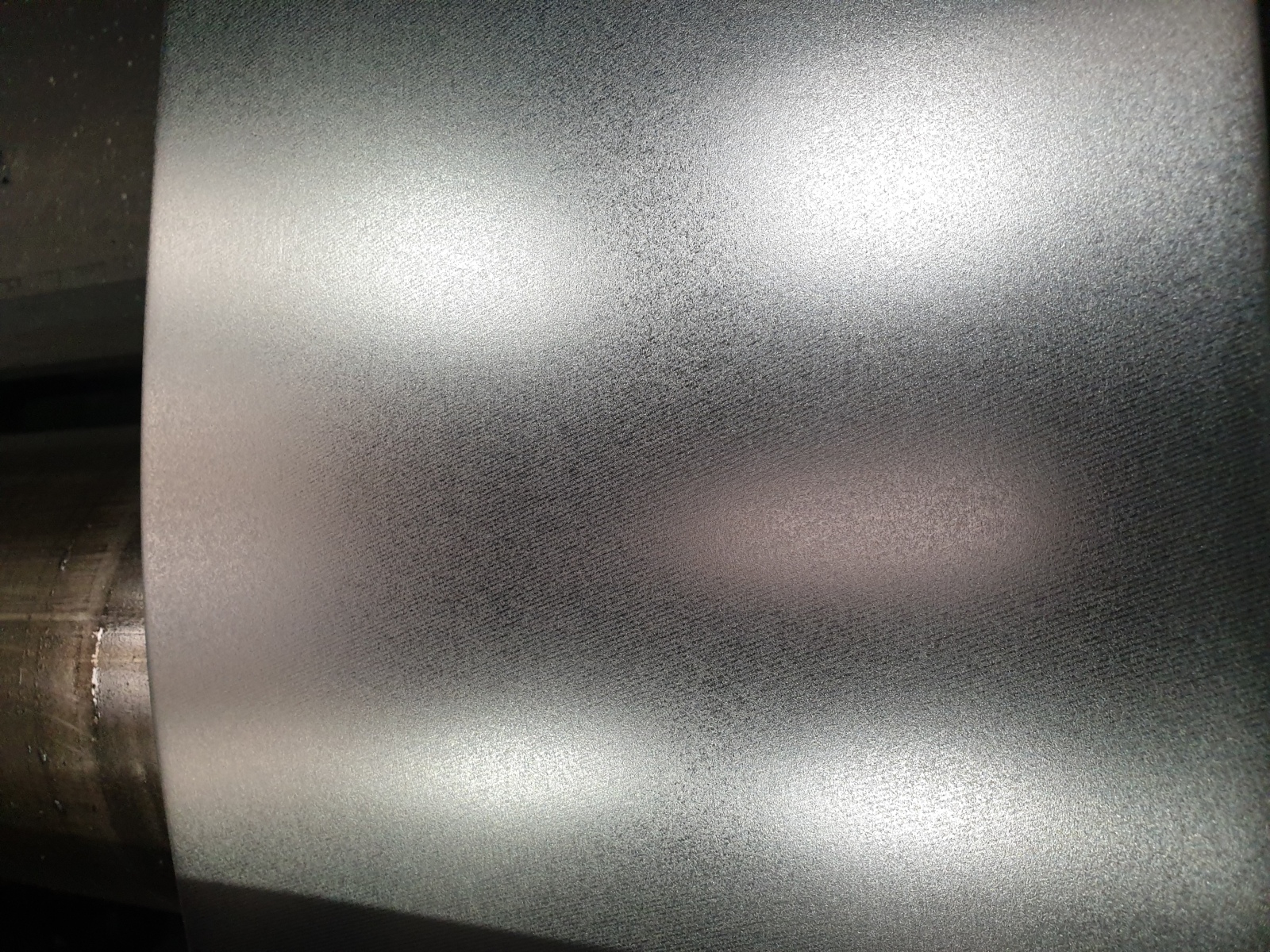
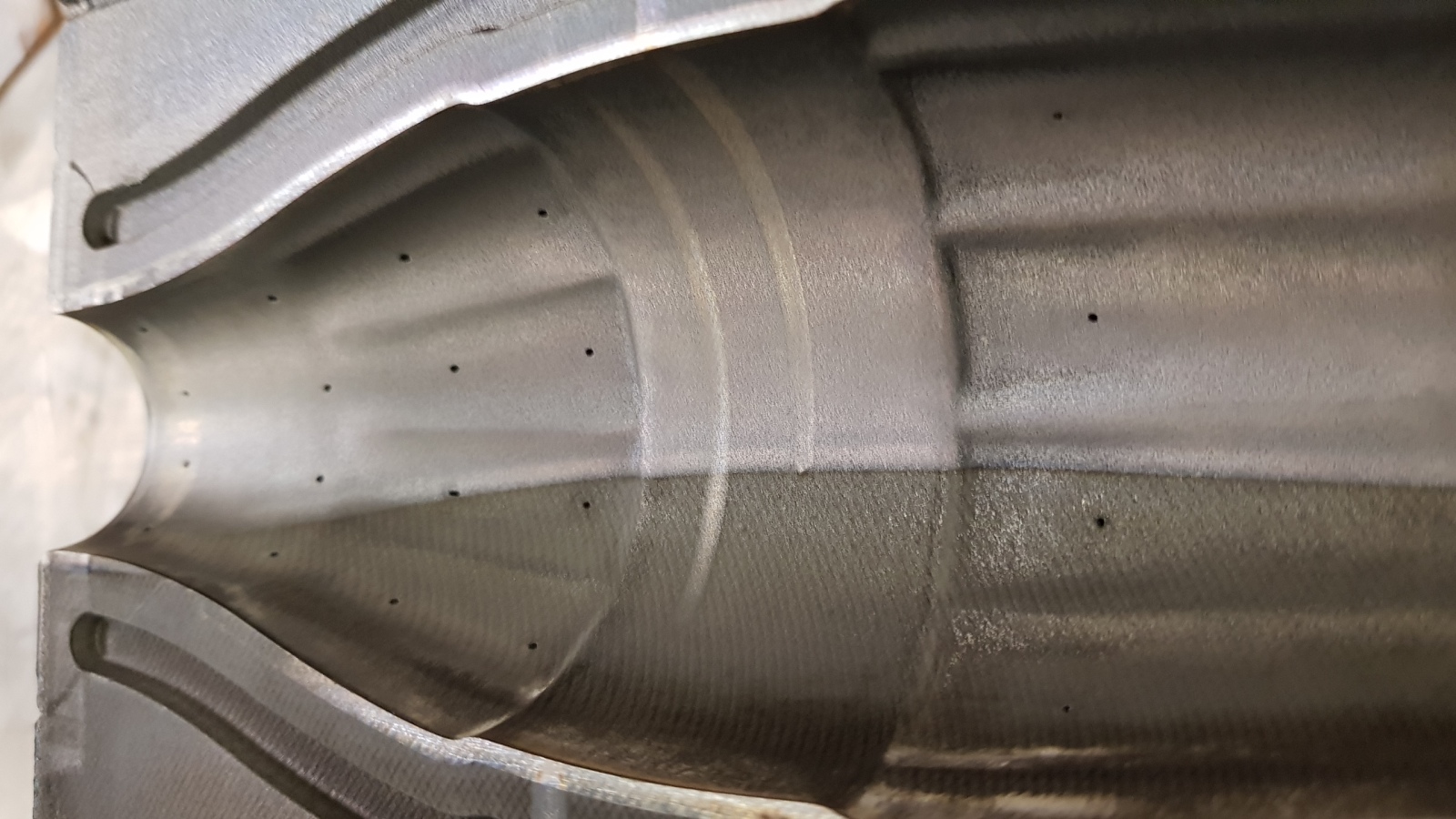
zie onder; links foto 1: bovenaanzicht reiniging; foto 2: pad polygone scanner; foto 3: plaat vóór reiniging; foto 4: na reiniging.


Inlinemonitoringsysteem
P-Laser heeft een inline spectraal monitoringsysteem (patent aangevraagd) ontwikkeld om de voortgang van de reiniging na te gaan. Industriële toepassingen vereisen inlinemonitoring van veranderingen in het basismateriaal en de kwaliteit van de reiniging. De laser vuurt infrarode laserpulsen af op het oppervlak. Door de infrarode straling oxideert de aanwezige verontreiniging. Dat proces is zichtbaar en kan worden gedetecteerd door een spectrale sensor. Zo krijgen we een spectrale momentopname van de toestand van het oppervlak (reflectie, absorptie). Door een spectrale ‘vingerafdruk’ van de gewenste toestand van het oppervlak te maken, kan het lasersysteem het oppervlak automatisch reinigen tot de beoogde kwaliteit is bereikt. Dit automatisch zelfregelende systeem beperkt de vertraging wanneer uw bronmateriaal in verschillende mate verontreinigd is en detecteert ongewenste stoffen, zoals chroom-, lood- of zinkdeeltjes.
Links ziet u een voorbeeld (glasmal) waarbij de vervuiling altijd anders is, afhankelijk van de productiecyclus. Dagelijks moeten er honderden glasmallen worden gereinigd. U kunt elke mal programmeren om binnen een vaste tijd van 45 seconden te worden gereinigd, maar sommige mallen hebben maar 30 seconden nodig. De overbodige tijd wordt door de spectrale sensor geoptimaliseerd, zodat alle mallen sneller gereinigd zijn.
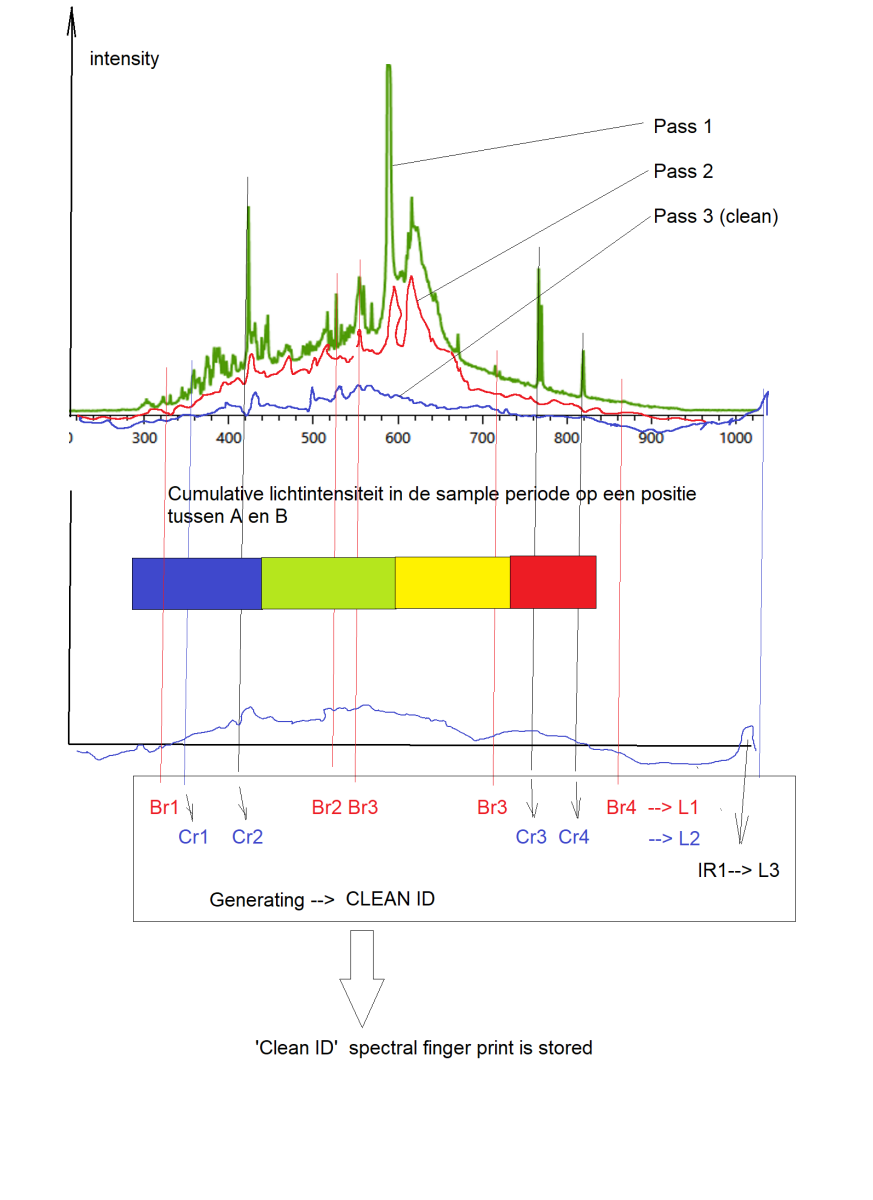
Links ziet u een spectrale lijnafdruk voor elke passage over de glasmal. De groene is na de eerste reiniging, de blauwe na de laatste. De verontreiniging op de mal wordt door de laserstraling geoxideerd. Daarbij wordt er licht teruggestuurd, dat de sensor vervolgens opvangt. Na elke reinigingsbeurt neemt de verontreiniging af en wordt er steeds minder licht gebruikt. Met het juiste algoritme kunt u het vereiste reinigingsniveau bepalen en een automatisch leerproces opstarten (machine learning).
Na elke reinigingsbeurt wordt de mal schoner, maar bepaalde delen zijn meer vervuild.
Met spectrale meting kunnen we dit detecteren en het reinigingsproces bijsturen om een homogeen resultaat tot stand te brengen. Dat is erg belangrijk om bijvoorbeeld een glazen fles perfect schoon te krijgen.